Nombre: Ablana.
Tipo: Velocista, giro con servo.
Objetivo: seguir una línea lo más rápido posible.
Base: coche rc escala 1/28, motor dc, servomotor.
Microcontrolador: PIC18F452 programado en C.
Driver: mosfet smd.
Sensores: CNY70.
Alimentación: 4 pilas AAA.
Ablana fue el segundo robot que preparamos para el Cosmobot 2008 (más acerca del concurso en la descripción de VIT),
su diseño se realizó en tan sólo una semana.
Teníamos la idea de hacer este robot con un coche a escala 1/28
(un miniz), pero en principio nos decidimos por VIT, escala 1/18 que
resultó ser demasiado grande para el radio de curvatura
mínimo del circuito.
Un poco desilusionados por la mala elección y sin mucha
esperanza en obtener buenos resultados porque sólo quedaba una
semana, nos pusimos a montar el miniz, Silent_ (mi compañero de equipo) se
lo llevo una tarde, por la noche hizó la placa del pic, y al
día siguiente estaba sobre la pista adelantando al 1/18. El
resultado de este tipo de coche rc para la prueba de velocistas es muy
bueno ya que su radio de giro es pequeño, en el Cosmobot hicimos de media 131 cm/s (nosotros llegamos a
medir 140 cm/s ya que utilizabamos el carril exterior).
EL diseño al igual que VIT tiene muchos fallos, tanto en
hardware como en el programa. Pero es una escala de la que esperamos
poder realizar un velocista competitivo (2 m/s) para próximos
concursos, yo ahora mismo me encuentro buscando componentes para su
nuevo diseño.
El coche es de la marca MiniZ (modelo RM015), su precio en tienda ronda
los 70 euros. Este es un coche que tiene muchos aficionados que
compiten de manera casi profesional, por lo que hay muchos upgrades
disponibles que poner: piezas de aluminio, distintos motores,
suspensiones, tipos de rueda etc... Así que quien se quiera
gastar más dinero puede acabar con una base muy buena para un
velocista, un coche de estos preparado puede superar los 100 km/h, con
8 km/h nosotros seríamos más que felices.
El coche trae una placa de electrónica, donde lleva
el receptor y la etapa de potencia con Mosfet, por lo que no vamos a
poder usar nada. Además este modelo de coche la
eletrónica del servomotor la lleva también en la placa
anterior, por lo que se la tendremos que añadir nosotros, y
aquí es donde tuvimos bastante suerte.. ya que le pudimos
acoplar la electrónica de un microservo de radiocontrol, que si
no lo llegamos a tener probablemente no nos habría dado tiempo a
tenerlo preparado para el concurso. Por este motivo es preferible
comprar otros coches a escala 1/28 antes que un miniz, por ejemplo los
iwaver, que llevan un microservo que podemos cambiar por el que
queramos, de esta forma podemos poner un servo más rápido
que es fundamental para el giro del coche.
La electrónica es muy sencilla, se tuvo que hacer deprisa y
corriendo y no tuvimos tiempo de cambiar nada. La placa de sensores
está realizada con CNY70, los leemos en digital como en
los robots anteriores. A diferencia del otro velocista del Cosmobot
esta vez no utilizamos un trigger smicht externo (aunque el robot lleva
una entrada con trigger externo que no acabamos utilizando), conectamos
los sensores a entradas del pic con este trigger interno, y no tuvimos
ningún tipo de problema con la luz en el concurso.
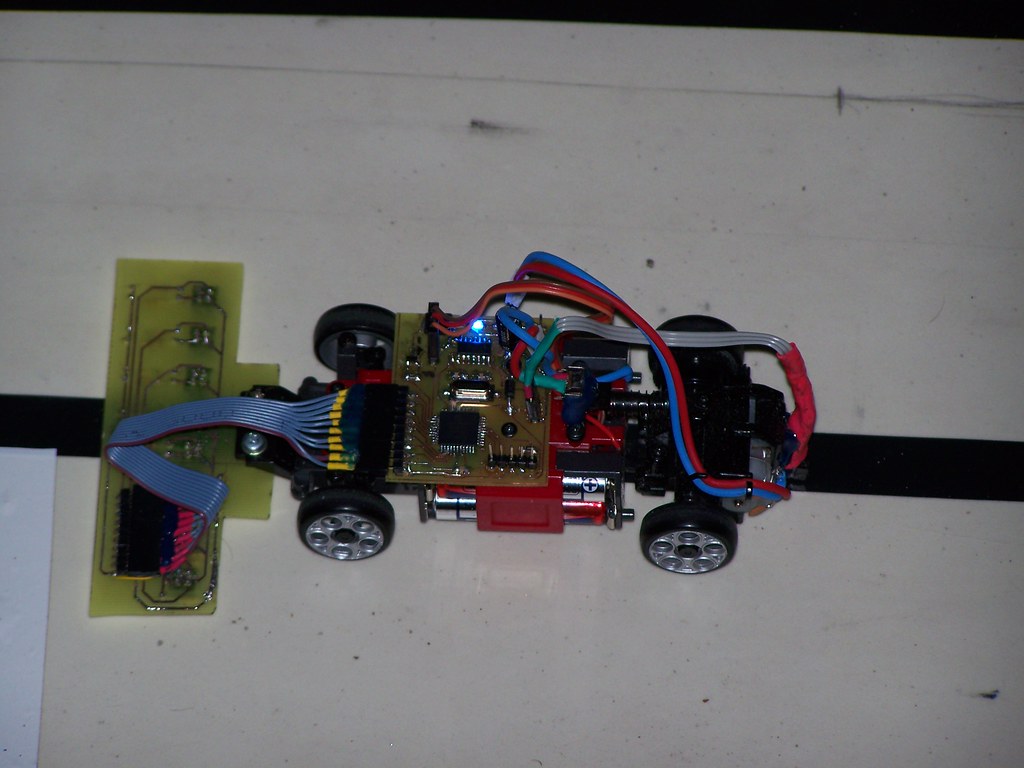
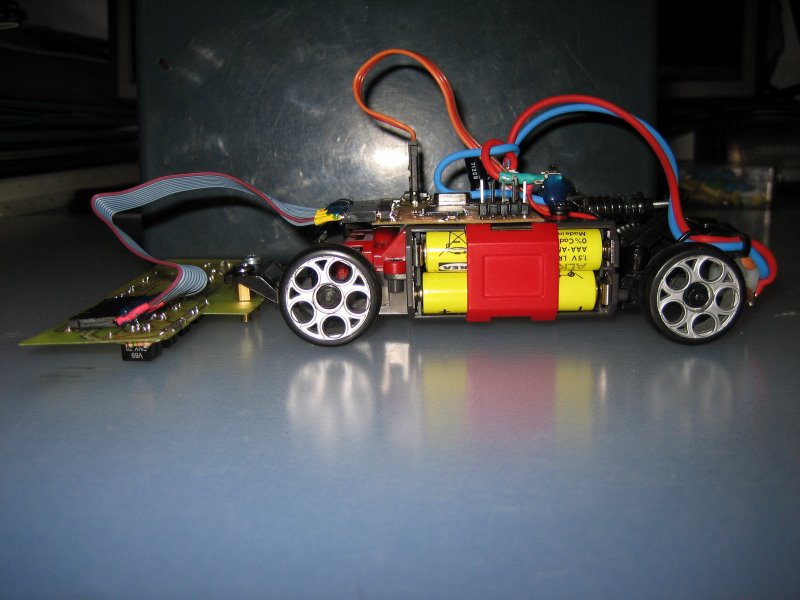
Electrónica montada en el coche:
La placa de sensores no la tengo ya que era una de las mias anteriores
que perdí, pero Silent me ha mandando la placa que diseño
para el PIC.
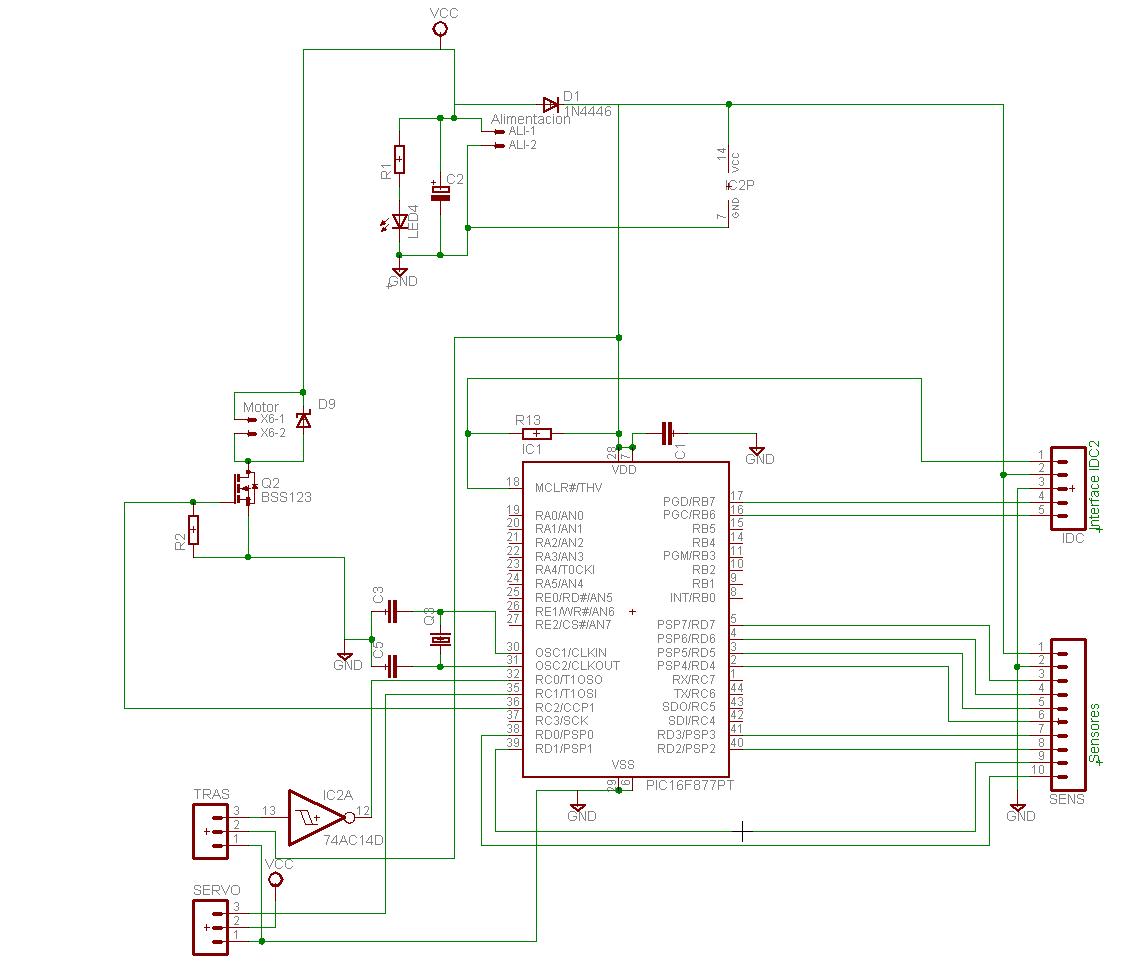
Esquema placa del pic:
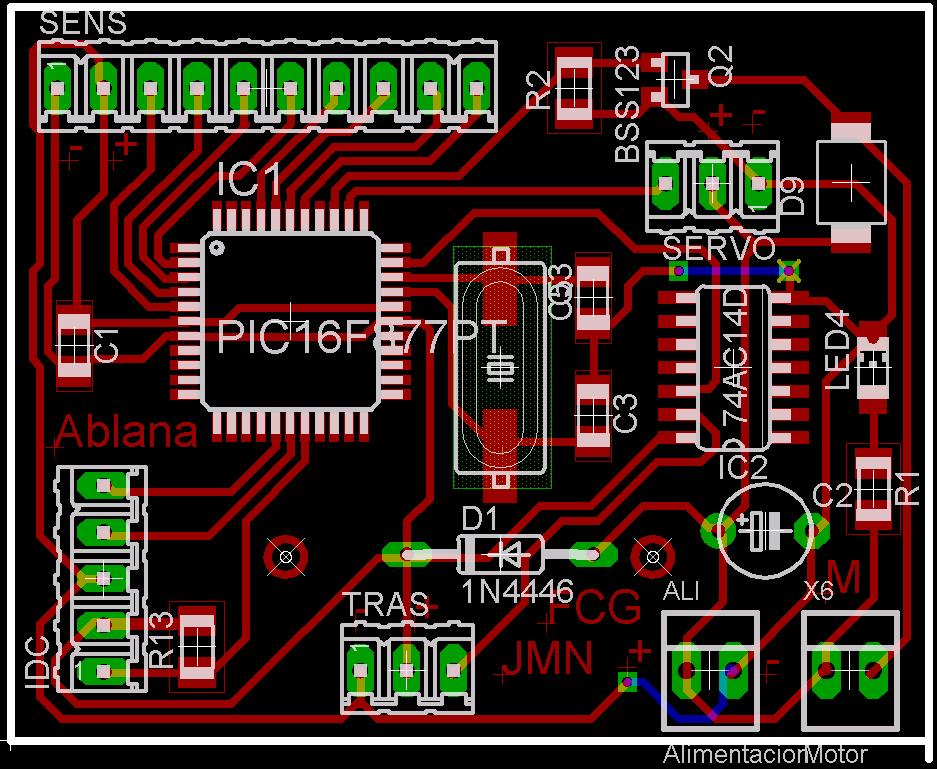
PCB placa del pic:
Como se puede observar en el esquema el diseño es muy sencillo.
Los ocho sensores delanteros entran al portD del pic, el cual cuenta
con un trigger smichtt interno. Dependiendo de la lectura de estos
sensores asignamos una velocidad para el motor y una posición
para el servo. El driver del motor va en la misma placa del pic, al
igual que en VIT tenemos el error de no utilizar un puente en H (no
había tiempo para hacerlo), hemos usado un Mosfet de canal N
smd, que aguanta algo más de 3 Amperios, y un diodo smd de
potencia para la bobina del motor. En la puerta de este transistor
tenemos una señal pwm generada por el módulo CCP1 del pic.
Lleva un trigger smicht externo con una entrada al pic, que no usamos
para nada, así que lo mejor es quitarlo. Lo pusimos para leer un
sensor trasero para saber cuando el coche estaba centrada con la
línea, pero al final no lo acabamos usando. Y en el caso de que
se use tampoco es necesario, ya que se puede usar otra entrada del pic
con trigger interno.
Un error grave que nos afecto en el concurso fue no haber puesto unos
microinterruptores para poder seleccionar distintas opciones del
programa una vez que el coche estuviese sobre la pista. No tuvimos
tiempo a hacer más, pero esto lo aprendimos bien, desde ahora
todos con microinterruptores.
Poco más que comentar sobre este diseño, un diodo led smd
que indicaba si la placa tenía alimentación, un diodo D1
de protección (yo no suelo ponerlos) ya que no utilizamos
fuente, la alimentación llega directa desde las pilas. Una
conexión para ser programado a través de ICD2 y los
típicos condensadores para eliminar transitorios. Los trazos
azules (pista en el top) son puentes, la placa es de una sola cara.
Arriba en donde pone sens está cambiado el - por el +.
Estuvimos probando este circuito durante la semana y no tuvimos ningún problema, así que lo damos por bueno.
Para su diseño usamos Eagle de cadsoft, para mí el mejor
soft disponible para diseñar pcbs, tiene en su página web
muchas librerias subidas por sus usuarios, por lo que no perderemos
tiempo haciendo los footprints de la mayoría de componentes que
vayamos a usar, Hay una versión de prueba gratuita que permite
hacer placas de hasta 8 cm x10 cm. Quién tenga dudas sobre que
soft usar para diseñar circuitos pues recomendarle que pruebe
este.
El programa que pongo al final es el que utilizamos en el concurso,
teníamos dos, uno con cambios de carril como VIT y otro para
correr por el carril de fuera. Como el de cambios de carril no tuvimos
casi tiempo de probarlo nos decidimos por usar el que habíamos
probado. El programa es lo más simple que se puede hacer, en
función del sensor leído se controla la velocidad y el
giro del servo. El programa es reciclado de otro robot que
teníamos por lo que alguna variables y trozo de código de
los que están sobran, pero cuando tienes una semana para hacer
un robot y dos programas pues no tuvimos tiempo para más.
Tanto el hard como el programa están probados (muchas vueltas) y funcionan perfectamente.
Para próximos diseños de velocistas vamos a volver a usar
esta escala, con una base buena de aluminio, y un buen motor y servo.
Respecto al hard y soft no vamos a reutilizar nada de este, la placa de
sensores y la del pic van a ser hechas de nuevo, hay que poner
microinterruptores. También vamos a usar un puente en H, y el
programa es el principal punto donde trabajar y mejorar, ya que es
donde menos hemos trabajado y donde más se puede mejorar con un
control PD. Pero todo esto para nuestro proyecto de Velocista 2009.
Bueno por último un video del coche funcionando (no tenemos los del concurso) Para cualquier comentario, duda o corrección...
Gracias por pasar por aquí
void inter (void); // declaración de la función de la interrupción
void inic (void);
#pragma code high_vector=0x08 // para que coloque este código en la
// dirección a la que
apunta el vector de interrupción
void interrupt_at_high_vector(void)
{
_asm GOTO inter _endasm
}
#pragma code // vuelvo a colocar el código en el sitio normal
//Declaracion de variables globales
int contador=0;
/********** Definiciones *******/
//definimos las variables de PWM y sentido de los motores
#define motor1PWM PORTCbits.RC2
default:break;
}//end de switch principal
}//end while(1)
}//end main
//******************************FUNCIONES*******************************************
void inic(void)
{//Funcion inicializacion
//configuración de los puertos, declarando como salida los pines necesarios
TRISA= 0b11111111; // Todo el puerto A como entradas (sensores traseros)
TRISB = 0b11101001;
// pongo todo el puerto B como salidas (ICD y LED)
TRISC = 0b11111001; // Pulsador y microruptores como entradas. PWM y servo salidas
TRISD = 0b11111111; // Todo el puerto D como entrada (sensores delanteros)
TRISE = 0b00000111; // Puerto E como entradas (sensores traseros)
ADCON1 = 0b00001111; //todo puerto A como digital4es.
OpenTimer0( TIMER_INT_ON & T0_16BIT & T0_SOURCE_INT & T0_PS_1_4 );
// inicializo el timer0 como timer de 16 bits, preesc 1:4 y
// habilitando la interrupción
// inicializo pwms con periodo máximo
OpenPWM1(255);
servo1=1;
// inicializo las salidas
estado=D1; // inicializo el estado
WriteTimer0(0xffff-duty1); //precargo el timer
// se establecen los valores de los pwms
vel=275;
SetDCPWM1(vel);
INTCONbits.GIEL=0;
//Deshabilito todas las
interrupciones -creo-
INTCONbits.GIEH=0;
INTCONbits.PEIE=0;
// deshabilito
interrupción de periféricos
INTCON2bits.TMR0IP = 1; //Para habilitar la prioridad alta en el tmr0?
INTCONbits.GIEH=1;
// habilito interrupciones
globales
}
#pragma interrupt inter //coloco la funcion de la interrupción en su sitio
void inter(void)
{
INTCONbits.GIEH=0; //Deshabilito interrupciones altas
INTCONbits.TMR0IF=0; //bajo el flag de la interrupción
switch (estado)
{
case D1:
servo1=1;
WriteTimer0(0xffff-3125+duty1); //temporizo los 2,5ms correspondientes
a este servo
// menos el tiempo de pulso
estado=NO_D1;
break;
case NO_D1:
servo1=0;
WriteTimer0(0xffff-(duty1));
//temporizo el resto de los 2,5 ms que no son tiempo
//de pulso (3125-duty1)
estado=RESTO;
break;
case RESTO:
servo1=0;
WriteTimer0(0xffff-21875); //resto
hasta los 20 ms (25000-3125=21875)
estado=D1;
}
INTCONbits.GIEH=1; //Deshabilito interrupciones altas
}