Como sensor se usa un CNY70, el esquema del montaje es muy sencillo:
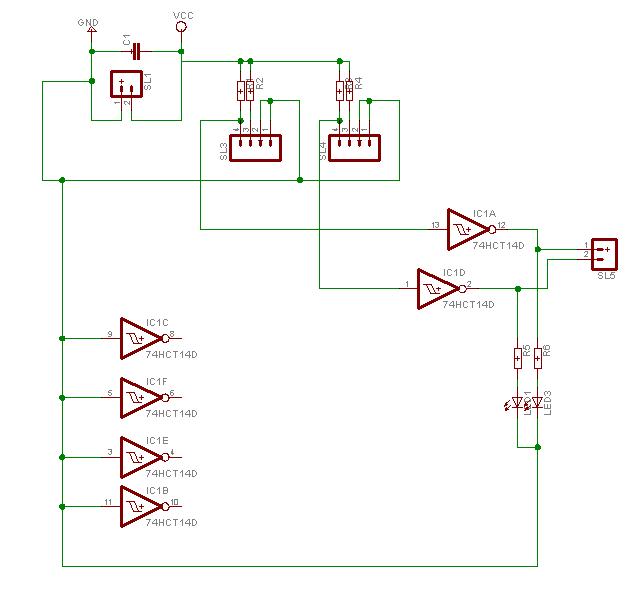
Dos conectores para los CNY70, las resistencias necesarias para su funcionamiento, dos leds con sus resitencias a la salida del circuito para comprobar de forma visual que los encoder están funcionado y un 74HCT14 para tener una odan cuadrada a partir de la señal generada por los sensores y también para poder alimentar los leds. Alimentando a una tensión baja podemos reducir las tensiones de umbral del 74HCT14, lo que nos permitiría detectar líneas más finas en el disco y tener una mayor resolución, el disco tiene seis líneas negras y seis blancas lo que es más que suficiente para tener una medida precisa de la velocidad en uno de estos coches funcionando como velocista.

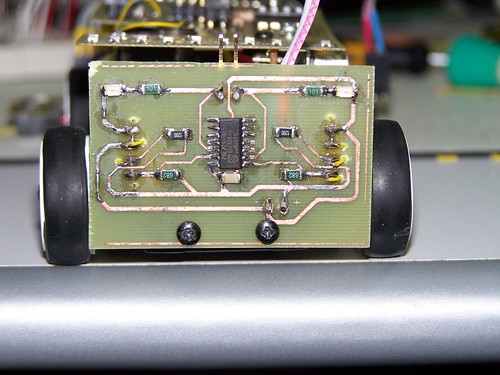
PCB.
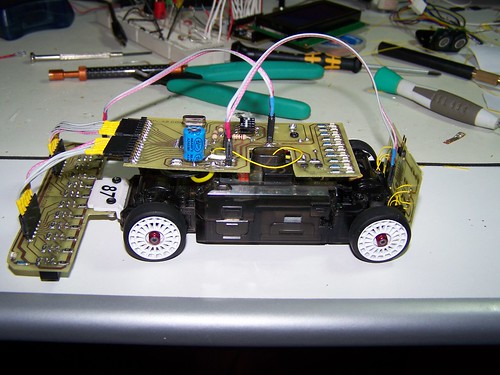
Fotos del montaje:
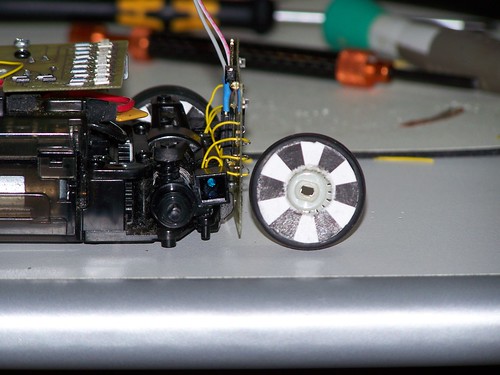
Los CNY van pegados sobre las manguetas traseras muy cerca de la rueda, sobre la que se ha hecho un disco en su interior.
Video del funcionamiento:
1. Prueba de los encoders.
2. Salida del CNY70.
3. Salida del circuito.
4. Salida del circuito menor velocidad.