Hoy ha llegado el paquete de servos y baterías para el
hexápodo desde china (ha tardado seis días y sin aduanas)
y por tanto me he pasado la mañana montandolo que ya
tenía ganas de hacerlo desde noviembre que llevo con el
esqueleto... El bautizo del hexápodo ha sido fácil, robot
de seis patas que pretende imitar a un insecto y lleva un par de leds
RGB de 3W para producir colores, y firefly (luciérnaga),
escarabajo de seis patas que emite luz, lo de volar ya se
solucionará por soft... (según la wikipedia las hembras
no vuelan así que es niña).
Con los servos me la he jugado totalmente (espero que funcionen bien)
ya que los he comprado en China y por un 20-30% más de lo que me
han costado podría haber comprado los Hitec que todo el mundo
usa para hacer estos robots, pero me he decidido por los chinos ya que
son digitales frente a los Hitec que son analógicos y tienen
bastante más par, 9.6 Kg-cm los Hitec frente a 15.8 Kg-cm.
Además los he visto que los venden en bricogeek.com link servo,
por 37.90+IVA y es algo más que el precio de Hitec que llevan
los hexápodos en las tiendas de aquí. Comprandolos en
china salen a $33 el servo, llegan en 5-6 días y las dos veces
que he pedido a esta tienda no me han metido aduanas, por lo que
supongo que es el mejor sitio para comprar este tipo de cosas en
cantidades elevadas (lo gastos de envio han sido $50 en un pedido de
$650), link a la tienda china.
También he aprovechado para comprar en esta tienda las
baterías lipo y el cargador (ésto ha ayudado a
comprar los servos chinos) que aquí unas baterías
similares cuestan demasiado, las baterías que va a llevar el
robot son dos lipos de 5000 mAh y 7.4V con una descarga de 20-30C por
$20 cada una, lo que proporciona en conjunto una batería de 10
Ah que espero que de una buena autonomía al robot, aunque
pondré especial cuidado en leer el estado de la batería
desde el robot y añadir electrónica para evitar que
FireFly se convierta en FireBall. Además las baterías
encajan a medida en la parte de debajo del robot, lo que hace que sean
ideales. Link a la batería, link al cargador.
El objetivo del proyecto (además de crear el cuerpo del robot
hexápodo) es aprender a usar la familia de los AVR, al ser un
proyecto muy extenso se tocarán la mayoría de los
periféricos y características del AVR ATMEGA1280, el que
viene con la placa de Arduino Mega ideal para este proyecto por un
número elevado de pines de I/O, 70 disponibles en total, 128k de
memoria de programa y 8k de ram, además de una arquitectura muy
superior a la de los pics de 8 bits, ya he empezado a meterme con el
datasheet y la verdad es que hay muchas diferencias a favor de los AVR,
ya compararé cuando tenga más conocimientos de estos
micros.
En principio se va a empezar el cuerpo del hexápodo con una
cabeza simple (si llega a buen fin ya se pensará en otra cabeza)
con sólo un servo y un par de sensores de distancia (infrarrojo
y ultrasonido), los módulos/pasos que tengo intención de
hacer son en orden los siguientes:
- Puertos digitales AVR (hecho).
- LCD 4x20 (hecho).
- Interrupciones externas AVR, crear un interfaz para el micro,
entradas 3 pulsadores y un potenciometro, salida LCD 4x20. (Iba a
terminarlo hoy pero llegarón los servos, para mañana si
tengo tiempo o esta semana si tengo algún rato).
- Servomotor, control y destriparlo. Conversor analógico digital AVR para el potenciometro anterior.
- Led RGB, control luminosidad. PWM AVR.
- Sensor Infrarrojo.
- Sensor ultrasonidos por I2C. TWI AVR.
- Control de 24 servomotores mediante placa Arduino Mega. Interrupciones, timers AVR y lo que sea necesario.
- Comunicación con el PC a través del FTDI. USART AVR.
- Comunicación inalámbrica con PC a través de un
integrado para tal fin de 2.4GHz con un interfaz SPI. SPI del AVR.
- Lectura y control del estado de la batería.
- PCBs para conexión de servomotores.
- PCBs para drivers de los LEDS.
- PCB para el interfaz físico (LCD y diversos botones).
- PCB circuito de lectura de la batería.
- Aplicación en el PC desde linux para controlar el hexápodo de manera inalámbrica.
- Primeros pasos del robot...
En cada paso se estudiará la parte necesaria de los AVR para su
realización, en principio todo en C (sin usar el entorno del
Arduino) con el WinAVR aunque también habrá que mirar el
ASM, el proyecto cubre la mayoría de necesidades que podemos
tener en un proyecto de robótica, como en el uso de timers,
interrupciones, conversor ADC, PWM, comunicaciones USART, SPI,
I2C, crear una aplicación para controlar el robot desde el PC,
uso de sensores, etc..
Supongo que me dejo alguna cosa de las que tenía pensadas, ya
las ire añadiendo y poniendo las ideas nuevas, evidentemente es
un proyecto muy largo por lo que poner fechas es tontería,
además depende del tiempo libre que se tenga... y los MiniZ
Cosmobot 2010 me parece que van a ser los de este año XD.
El precio de comprar un robot de este tipo por piezas y hacerselo uno
mismo no es menor que el de comprar un robolid por ejemplo, yo
diría que el precio de todo el material que se necesite va a ser
más o menos igual que el de comprar un bípedo o biolid,
estimo que el coste total del hexápodo una vez terminado
estará sobre los 700-800 euros que es lo que suele costar uno de
los robots anteriores (esto de hacer robots es muy caro =(), la
diferencia es que aquí hacemos nuestro robot desde cero y a
nuestro gusto y tenemos que enfrentarnos a todos los problemas de
electrónica, mientras que en el otro obtenemos una plataforma ya
hecha que sabemos que va a funcionar a la perfección y que
debemos programar, las dos opciones son buenas y a cada uno lo que le
guste. Haciendolo nosotros aprenderemos mucho más pero
también necesitamos mucho más tiempo.
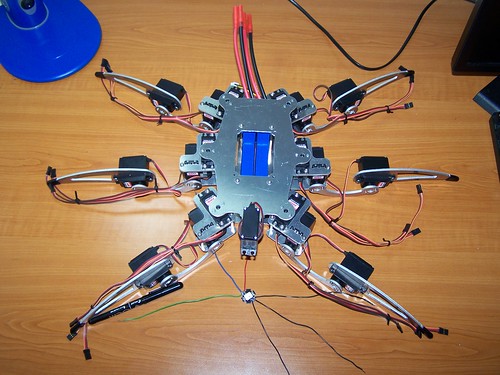
Bueno por último unas fotos de la base del robot, las
baterías van metidas entre el esqueleto y parece que ese va a
ser su sitio final. La cabeza va a ir elevada sobre el cuerpo y los
leds por debajo uno delante y otro detrás. Para mayor detalle
clicks en las fotos.