Comunicación Interfaz coche mediante I2C. Subo unas primeras funciones de I2C
que parecen funcionar para ir ordenando código en algún
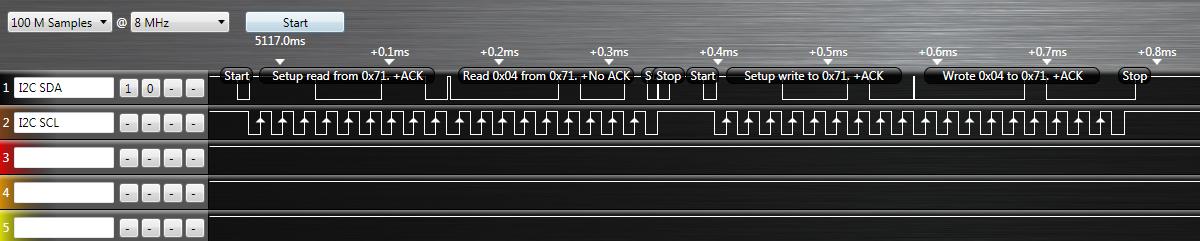
sitio. Se envia y recibe un byte en los 4 modos posibles del bus I2C:
MT, MR, ST y SR.
El coche será el maestro ya que el tiempo disponible para las
comunicaciones tiene que ir sincronizado con el resto de acciones a
realizar, el interfaz funciona como esclavo respondiendo mediante una
interrupción a la comunicación I2C del maestro. Se ha
añadido una variable en los while() de espera del coche para no
quedarse nunca bloqueado, en los while() de espera del interfaz se
puede quedar encerrado pero es muy poco probable, además cuando
esto ocurra está el botón del reset...
El ejemplo para probar las funciones consiste en apagar y encender los
leds del coche desde el interfaz. Para ello el coche (maestro) le pide
al interfaz (esclavo) que que le mande un byte de datos en el que va el
estado de cada led y se encienden o apagan en el coche. A
continuación el coche manda al interfaz un byte de datos
con el estado de sus leds y lo escribe en la pantalla del LCD. La
primera columna de ON/OFF es el byte que manda el interfaz y la segunda
el que recibe, deben de ser iguales si el funcionamiento es correcto.