Subo una primera versión del hard del miniz y programa que puede
servir para probar la base, incompleta en todos los aspectos pero con
la que se puede empezar a trabajar y probar para pensar lo que se
quiere hacer, (no está probado todo el hard ni firm, es
sólo una versión de prueba que en principio parece que
funciona). Recopilo toda la información desde el principio:
El objetivo es modificar un coche radiocontrol de escala 1/28 para
convertirlo en un robot velocista, elegimos esta escala porque es de
las menores que podemos encontrar (aunque Kyosho ha sacado un coche
1/38 o por ahí, dnano, que habrá que probar) y por tanto
nos permite movernos en radios de curvatura más pequeños,
con el 1/28 podemos trazar los radios de curvatura mínimos del
Cosmobot sin problemas, otra cosa es a que velocidad seamos capaces de
hacerlo..
Lo primero es hacerse con un miniz (MR02, MR015, AWD), en tienda ronda
los 130 euros, en los foros de rc se pueden conseguir coches
prácticamente nuevos y upgradeados a un buen precio, http://www.minizz.com/forum10.html y foro coches rc
son buenos sitios donde buscar. Una vez que tengamos el coche lo
primero es reutilizar la máxima electrónica posible,
aquí está la electrónica que trae y como usarla: miniz electrónica
, de esta forma tenemos toda la electrónica necesaria, y
sólo tendremos que hacer una placa de sensores para leer la
línea y otra con un microcontrolador para mandar la señal
de control a la electrónica del coche en función de la
lectura de los sensores. Para elaborar las placas en casa este enlace.
Una primera placa de sensores es la de abajo, son 16 sensores uno a
continuación de otro para leer en digital, con una anchura de
aproximadamente 12.5 cm, y en esta placa es lo primero que debemos de
pensar a la hora de diseñar el coche. Primero si queremos leer
en digital o en analógico con las ventajas de resolución
y número de sensores que aporta a costa de complicar más
el firm, segundo la anchura de la placa y resolución necesaria.
Los sensores se han puesto uno a continuación de otro de tal
forma que tendremos el máximo número de CNY70 posibles sobre la línea, ya que en principio se va a intentar leer en digital.
La anchura de la placa de sensores dependerá de la distancia de
ésta al punto del coche que debe de seguir la línea, y
aquí es donde está mi primer problema que aún sin
la prueba/error suficiente no sé enfocar muy bien para
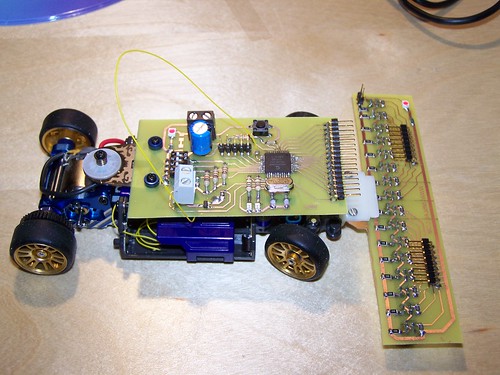
resolverlo. ¿Qué punto del coche debe de seguir la
línea?. El centro de giro del coche se encuentra fuera de
éste, en el punto intersección de las rectas del eje
delantero y del eje trasero (si se observa la primera foto y se
prolonga imaginariamente los ejes se puede hacer una idea). Bueno pues
yo he considerado que el punto del coche que debe de seguir la
línea es el punto central entre las dos ruedas traseras,
éste va a ser mi punto de referencia a la hora de programar, por
lo que si pincho con un compás en el centro de giro (para el
giro máximo de las ruedas delanteras) y trazo una circunferencia
desde el punto central trasero veo que superficie de sensores de la
placa me resulta útil, ya que el punto central trasero
sólo va a poder girar/ir hasta el punto intersección de
la circunferencia trazada con el eje "cny" de la placa de sensores, por
lo que ese sensor indicaría el giro máximo de la rueda, y
todo sensor más alejado del centro que el sensor de giro
máximo en principio sería inútil para el valor
proporcional, para este coche a esta distancia me salen 8 cm de placa
de sensores necesaria.
Cuanto más alejada esté la placa de sensores del coche
mayor será la resolución que tendremos ya que
necesitaremos más superficie de sensores para un mismo
ángulo de giro, pero tb mayor será la probabilidad de
tocar la línea roja y ser descalificados. Si el punto del coche
que debe seguir la línea y debemos tomar como referencia es otro
como el centro de masas, pues complicaría la cosa bastante..,
primero porque habría que hallarlo para conocer la superficie
útil de sensores o ajustar por prueba y error la constante
proporcional, perderíamos mucha resolución y
necesitaríamos una placa mucho más pequeña ya que
estaría mucho más cerca de los sensores. Con todo esto en
mente he diseñado una primera placa de sensores con 16 cny para
que en cuanto a superficie y pruebas sea lo más flexible
posible, una vez que sepamos lo que necesitamos habría que
reducirla a las dimensiones requeridas, ya que cuanto más ancha
peor, mayor es la porbabilidad de tocar la línea roja.
Bueno pues este es mi principal problema, que no sé como enfocar
la parte mecánica y si lo que he pensado es correcto, y me doy
cuenta que tener clara la parte mecánica para saber lo que se
quiere hacer es lo más importante a la hora de diseñar un
robot, y la electrónica y la programación son sólo
las herramientas para hallar esos objetivos. Agradecería
cualquier comentario sobre como enfocar/resolver la colocación
de la placa de sensores y que punto del coche se debe tomar como
referencia a la hora de programar, tema de inercias etc.. ya que mis
conocimientos de mecánica son muy pobres.
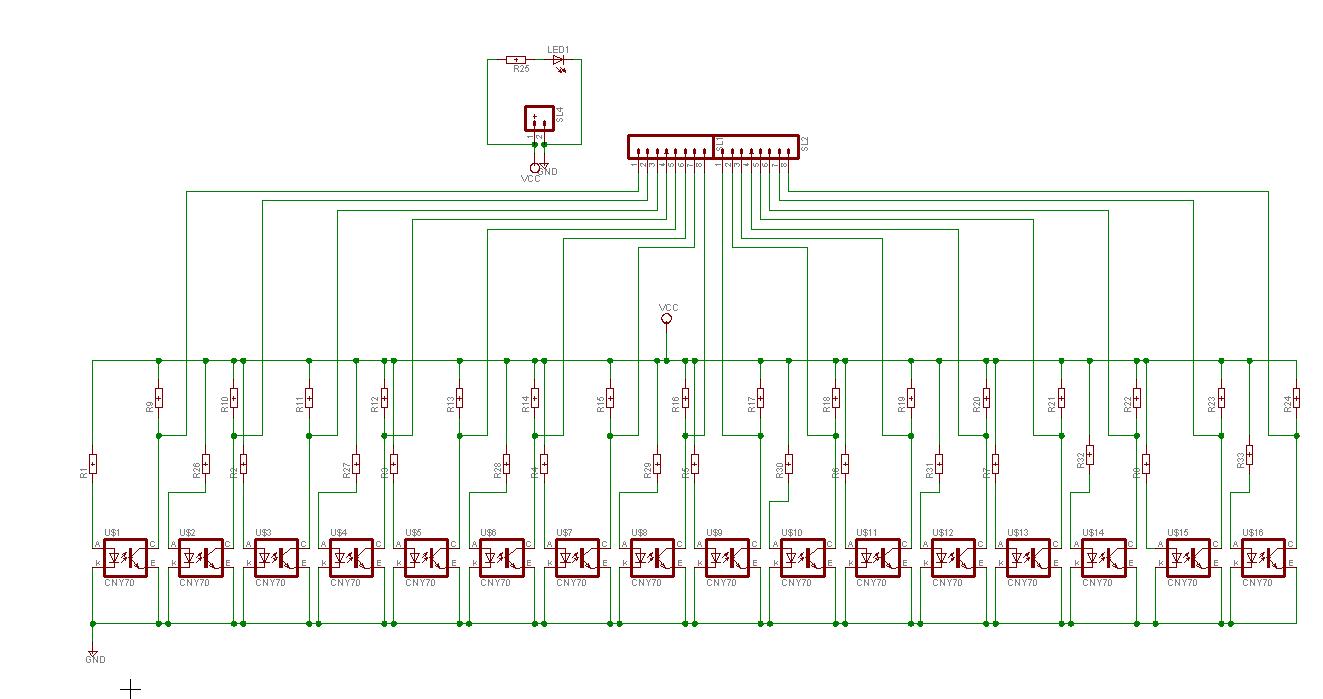
Adjunto el esquema de la placa de sensores y el pcb en pdf (espero que
salga a escala real, he utilizado una impresora a pdf de esas que hay).
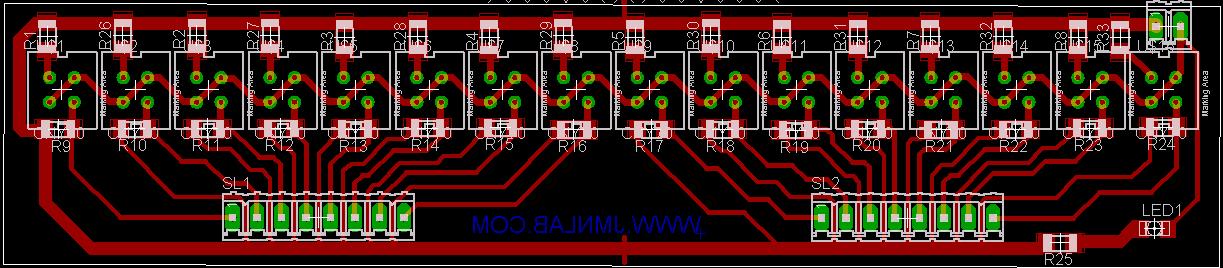
PCB para realizar la transparencia.
La transparencia hay que invertirla para que las letras se lean de
izquierda a derecha. El valor de las resistencias de diodo es de 120
ohmios (R1, R26...) y el valor de la resistencia de transitor 15k
ohmios (R9, R10..), el valor de la R del led depende del color, en este
caso para un led rosa 180 ohmios.
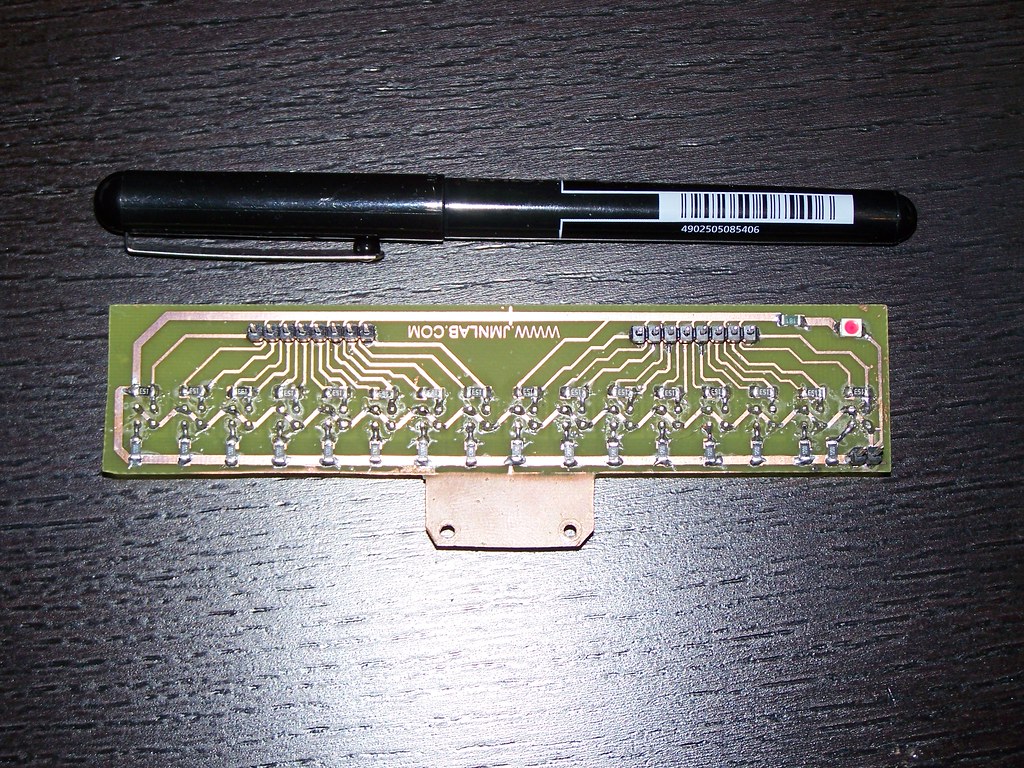
Resultado del montaje final:
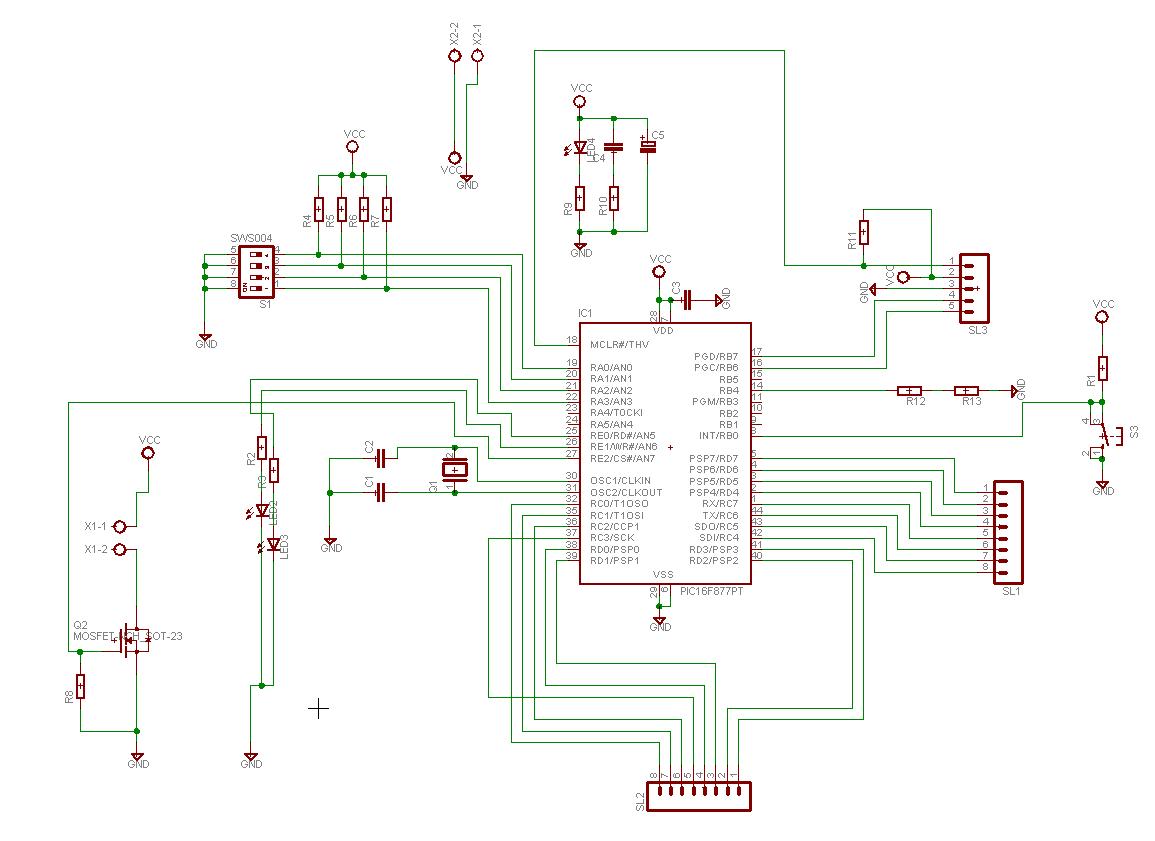
La otra placa que debemos hacer es la del microcontrolador que lea los
sensores y mande la señal de control a la electrónica del
coche, como micro se ha usado un 18f452 aunque sigo pensando en el
atmega16, la placa es lo más sencilla posible. 16 entradas de
sensores pasadas por un trigger smichtt interno del puerto del micro,
un par de diodos leds para posibles pruebas, detectar resets etc.. y
unos cuantos interruptores. También se ha añadido un
mosfet para apagar y encender la placa de sensores, ya que el consumo
de 16 cny con esas resistencias de diodo es bastante elevado, por lo
que la idea es encender, leer y apagar hasta el siguiente ciclo. PCB
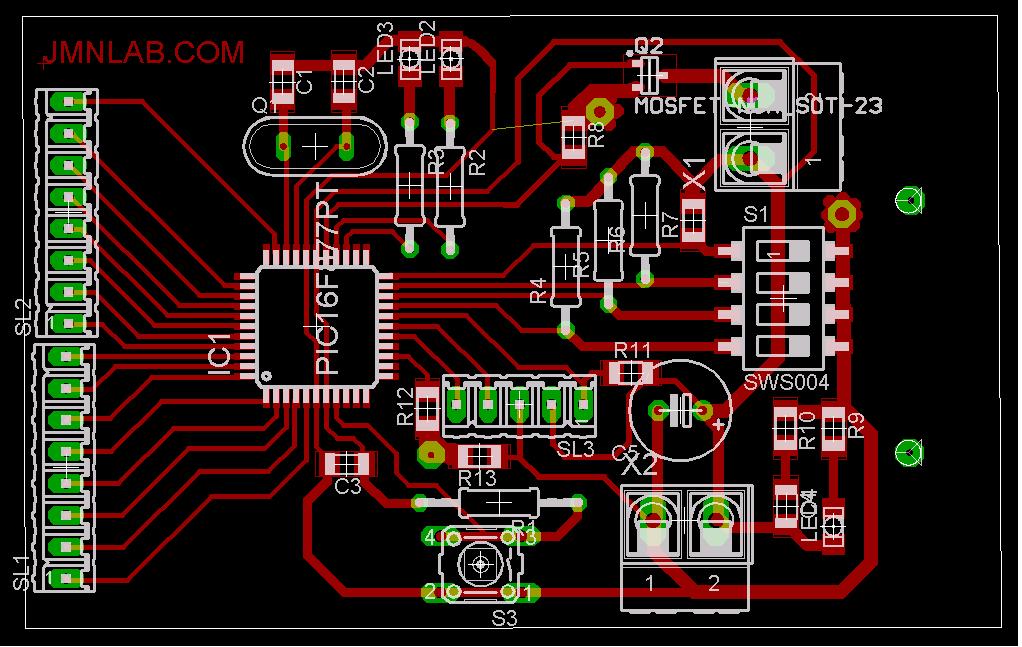
de la placa del pic para realizar la transparencia, aquí las
letras están en la cara top y no hay que invertir la
transparencia a la hora de colocarla sobre el cobre, hay que realizar
un puente entre el punto que está al lado de R8 y el otro
cercano a S1.
Resultado final del montaje:
Los valores de los componentes se pueden apreciar en la foto, cristal
de 16 Mhz con los condensadores de 22pF, condensador de desacoplo del
pic de 100nF, R de led de 150 Ohmios, R de pull-up interruptores de
10K, R de mosfet de 120k, R del divisor de 560 ohmios para adaptar
niveles entre el micro del coche y el nuestro.
El micro está programado en C usando el compilador de microchip,
del que se puede bajar una versión gratuita con límite de
dos meses en las opciones de optimización, para generar la
señal requerida por el miniz usaremos una interrupción de
un timer del pic, como se explica aquí.
El resto de programa es sólo un control proporcional de
posición con unos valores de velocidad fija para que el coche
siga la línea, está hecho deprisa y corriendo para probar
el hard del coche por lo que habrá muchos errores. Se usan float
cuando se deben evitar ya que las operaciones en coma flotante son
mucho más lentas, por lo que habrá que escalar los
valores asignados a los sensores para siempre obtener números
enteros en las operaciones, es sencillo y evitamos usar float.
Respecto a la mecánica del coche he visto que poner upgrades no
es lo mejor, se ha cambiado la bancada trasera para añadir un
motor más potente y pasa a ser casi incontrolable, por lo que
puede que mejor sea vovler al motor de serie, ya que también
dispará el consumo por tres, comiendose la batería en
unas pocas vueltas. Con el miniz anterior de serie y unas pilas
recargables de 850 mAh le hemos tenido hasta 30 min en pista dando
vueltas de forma continua a más de 130 cm/s, por lo que el motor
de serie casi seguro que va a ser la mejor opción. Otra cosa muy
importante es utilizar la opción del freno, en las pruebas el
coche en parar sin frenar desde una velocidad elevada lo hace en uno,
dos metros, frenando, en 3-10 cm aproximadamente. Por lo que si
queremos correr y ser competitivos trabajar en este punto es muy
importante.
La programación es el punto donde más hay que trabajar, y
es lo que intentaremos los próximos meses, a ver si conseguimos
que un cochecito de estos le plante cara a un diferencial, la parte D
del regulador es 100% necesaria, ya que en recta oscial demasiado nada
más que se quiere correr un poco, también puede ser un
problema de las mecánicas de estos coches que probablemente haya
que upgradear para solucionar.
Esta electrónica la voy a probar en un nuevo modelo de miniz que
compre en uno de los foros anteriores por la mitad de su precio sin
uso, un miniz AWD , tracción a las 4 ruedas, a ver que tal sale.
En principio la electrónica que lleva parece ser la misma a
simple vista (aún hay que comprobarlo), por lo que estas dos
mismas placas valdrían.
Miniz AWD.
Un video del funcionamiento del coche anterior, el motor es demasiado
potente, por lo que si se quiere usar habrá que meterle muchas
horas de programación.