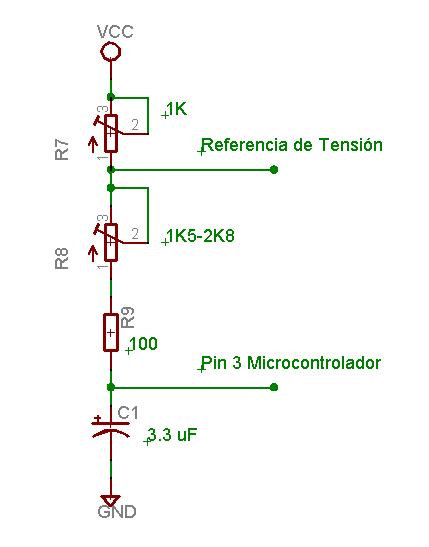
Cable verde (borne2 R), canal azul.
Respecto a tierra.

| 1. Izquierda | 1. Centro | 1. Derecha |
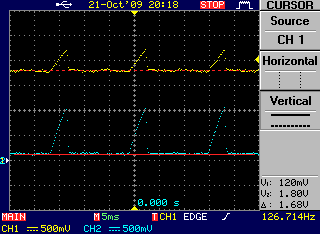
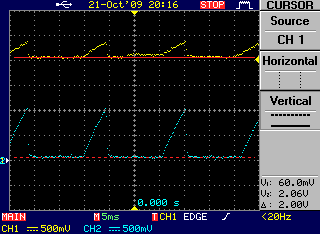
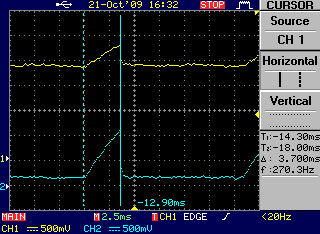
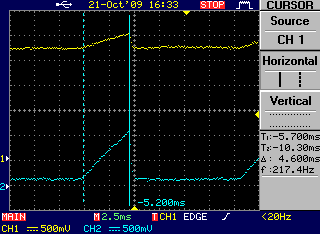
| 1518 Ohmios | Cable Naranja (borne1 R), canal amarillo. Cable verde (borne2 R), canal azul. Respecto a tierra. |
2886 Ohmios |
|
|
|
|
|
|
|
|
|
| Caída en la R, respecto a tierra. | Caída en la R, respecto a tierra. | Caída en la R, respecto a tierra. |
|
|
|
|
|
|
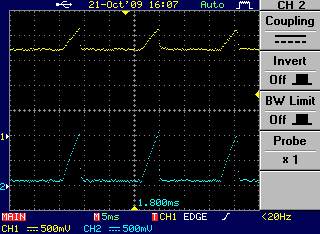
| 2. PIN MICRONCONTROLADOR COCHE | 2. PIN MICRONCONTROLADOR COCHE | 2. PIN MICRONCONTROLADOR COCHE |
|
|
|
|
|
|
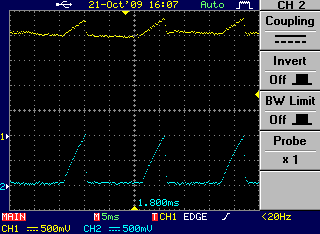
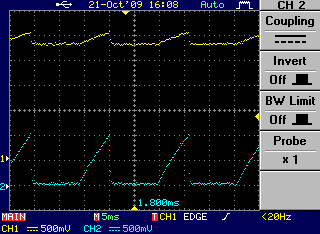
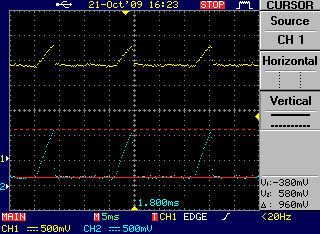
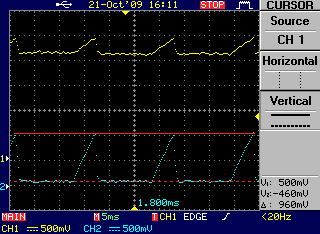
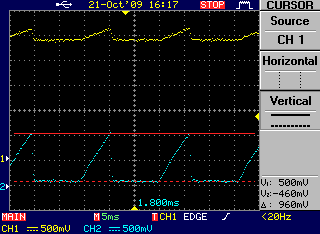
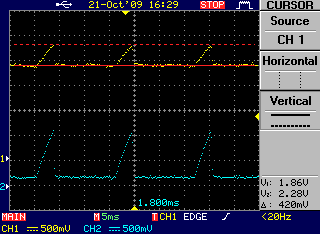
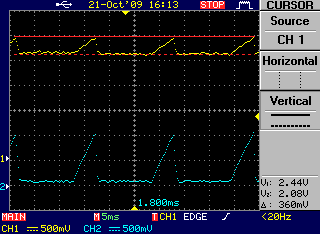
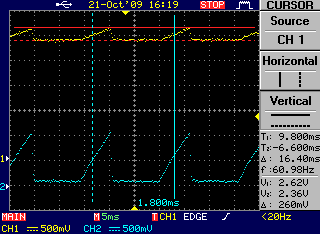
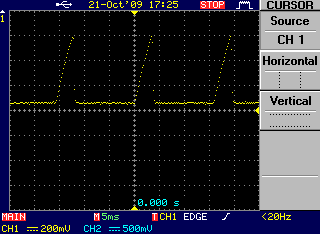
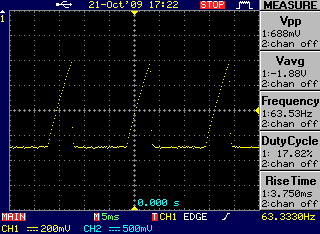
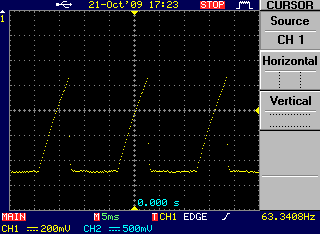
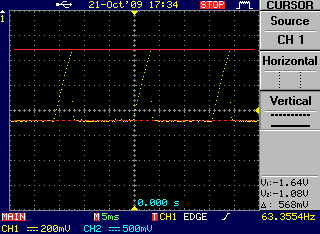
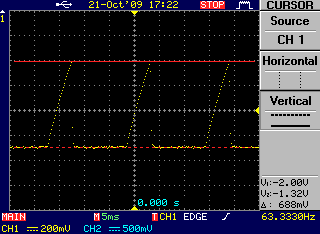
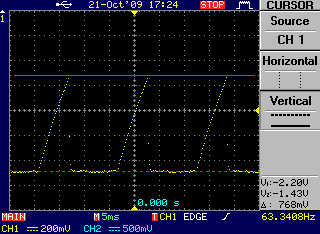
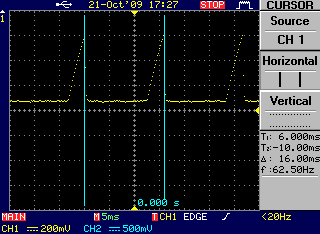
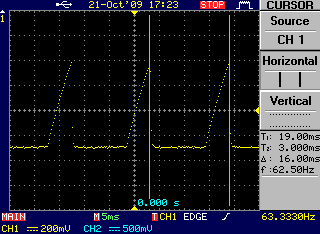
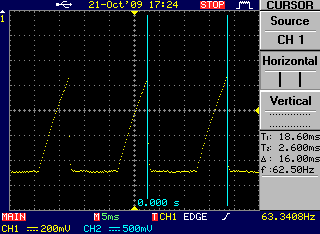
| Frecuencia = 62.5 Hz | Frecuencia = 62.5 Hz | Frecuencia = 62.5 Hz |
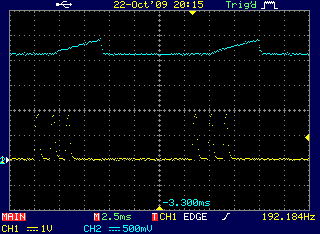
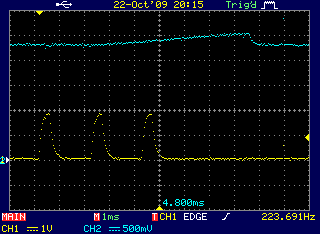
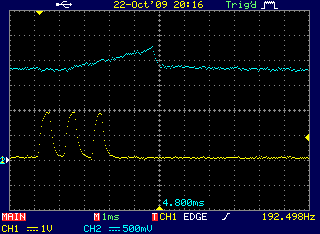
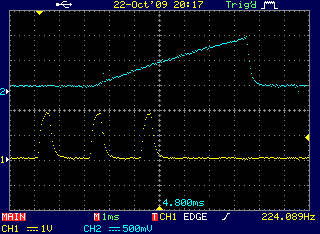
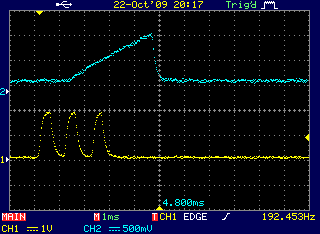
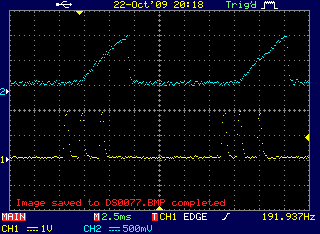
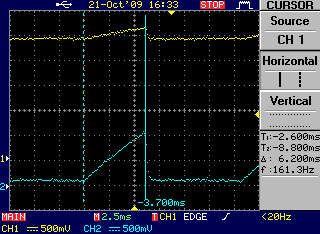
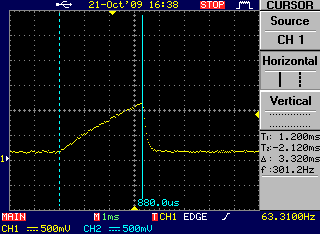
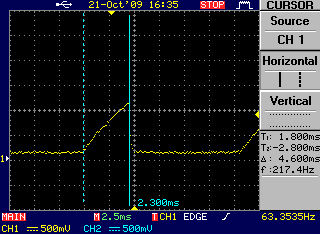
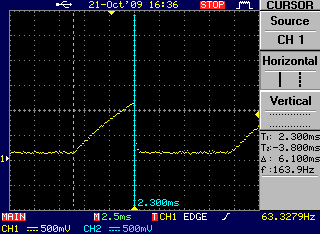
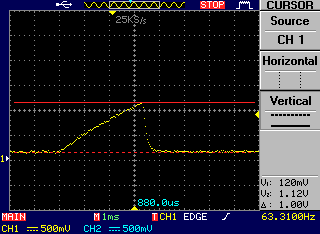
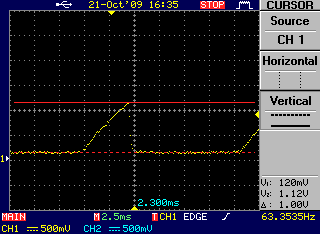
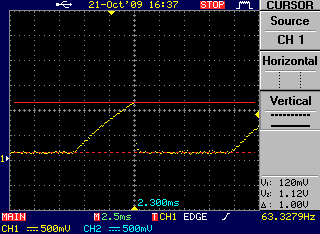
| 3. Osciloscopio bornes resistencia | 3. Osciloscopio bornes resistencia | 3. Osciloscopio bornes resistencia |
| Izquierda | Centro | Derecha |
|
|
|
|
|
|
|
|
|
| Rizq= 1518 Ohmios | Rd = 2886 Ohmios |