Una
de las decisiones más importantes a la hora de construir un
robot es la elección del motor, de los motores depende la
autonomía, la electrónica necesaria, las
baterías
a usar, una gran parte del precio del robot si estos son buenos, etc..
Me encuentro haciendo un robot de sumo para la categoría de
3
Kg y 20x20 cm^2, la prueba consiste en sacar a otro robot del "tatami"
(recinto
circular) y la forma general de hacerlo es que los robots se empujen
hasta que uno de los dos salga fuera, por lo que la elección
de unos motores que se ajusten a nuestra estrategía es
fundamental.
Lo primero es saber lo que buscamos y recordar aquella
fisíca
del instituto para poder definir las características
principales
del motor requerido, de nada nos sirve poner un motor muy caro si no lo
podemos aprovechar y mucho menos un motor que se nos quede
pequeño. Las principales características a la
hora de
elegir un motor son el par (torque), velocidad, consumo,
tamaño,
peso y precio, aquí suele funcionar lo de cuanto
más caro
mejor.
Lo primero es definir el par necesario para mover nuestro robot y sacar
al otro del tatami, este par necesario que tendrán que
ejercer
los motores va a ser función del peso de nuestro robot, del
radio de la rueda que usemos y del coeficiente de rozamiento de la
rueda con el suelo. Por ejemplo, si tenemos una rueda de 3 cm
de
radio y una fuerza de rozamiento estático en la rueda de 10
Newtons, nuestro par máximo aprovechable será de
30N-cm
(T=Fuerza*radio). Esta fuerza de rozamiento es la fuerza
máxima de empuje que nuestro robot será capaz de
hacer,
cualquier par del motor por encima de la Fr*radio no podremos
utilizarlo, es más provocará que la rueda
comience a
deslizar, pasando a tener un coeficiente de rozamiento
dinámico
que es menor que el coeficiente de rozamiento estático que
teníamos antes, por lo que nuestra fuerza de rozamiento
será menor reduciendo nuestro empuje.
Por lo que nuestro primer objetivo es tener una fuerza de rozamiento lo
mayor posible (Fr= coeficiente de rozamiento * masa*gravedad), para
ello debemos llevar la masa máxima permitida de 3 Kg, si nos
quedamos cortos tendremos que meter lastre al robot. Otra forma de
aumentar el coeficiente de rozamiento es seleccionar unas ruedas de
material adecuado, goma blanda, foam, etc.. y que la superficie de
contacto con el suelo sea lo mayor posible. Aquí tenemos lo
primero en que pensar sobre el diseño del robot,
número
de ruedas a usar. La desventaja de los robots de dos ruedas es que
tienen un tercer punto de apoyo, por lo que el peso (m*g) del robot
estará repartido entre las dos ruedas y este tercer punto,
haciendo que la fuerza de rozamiento del robot en las ruedas no sea la
máxima posible debido a este punto de apoyo. Un robot de 4 o
más ruedas no tiene esta desventaja, ya que todo el peso del
robot está repartido sobre las 4 ruedas, la tercera
opción es usar correas como los tanques para la
tracción,
aquí conseguimos una mayor superficie de contacto, pero nos
encontramos con la pega de que será mucho más
difícil girar debido al gran rozamiento por lo que lo
harémos
de manera más lenta, también su
construcción es
bastante más complicada que en el caso anterior.
Por último para aumentar nuestra fuerza de empuje podemos
aumentar nuestro peso (nuestra fuerza normal), para ello se pueden
utilizar elementos como ventiladores, imánes si el tatami es
metálico, pero lo más sencillo es intentar que el
robot
del oponente acabe encima del nuestro, aumentando nuestro peso y fuerza
de rozamiento y disminuyendo la suya. Para ello se suelen colocar
cuñas, rampas para que al impactar con el oponente se nos
suba
encima, nuestra parte delantera debe de estar pegada al suelo para
evitar ser levantados, y si además es inclinada mejor ya que
puede acabar el otro robot encima.
La velocidad es la otra característica fundamental a la hora
de
seleccionar un motor, nos permitirá movernos más
rápido o más lento por el tatami para llevar a
cabo
nuestras distintas estrategías y aprovechar nuestro momento
lineal (m*v) para iniciar el desplazamiento del oponente e incluso
mandarlo fuera. La velocidad del motor es función del par
aplicado, el motor siempre intentará que su velocidad sea lo
máxima posible y el par siempre será el necesario para contrarrestar el producido
por la carga, para ver la relación entre par y
velocidad debemos ver las gráficas proporcionadas por los
fabricantes de los motores.
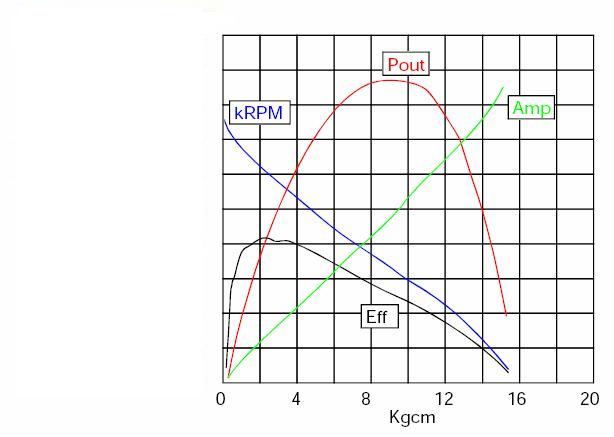
La gráfica anterior es de un motor de Lynxmotion en el que
el
eje X se corresponde con el par Kg*cm y el eje Y con la velocidad, sus
características para 12 voltios son:
Velocidad sin carga: 152 r.p.m
Para máximo: 16kg-cm
Corriente sin carga: 155 mA.
La gráfica azul se corresponde con la velocidad, cuando el
par es mínimo (no tenemos carga) la velocidad es
máxima, y la corriente sin carga que circula por el motor es la debida
a las pérdidas, la velocidad es proporcional al voltaje
aplicado al motor y el par a la intensidad que lo atraviesa, dando
lugar a las constantes Kv y Kt ( r.p.m=Kv*voltios y
Torque=Kt*Intensidad) que proporcionan los fabricantes. Cuanto mayor es
la velocidad mayor es el potencial que se genera en el motor
oponiendose al de alimentación y por tanto menor la
intensidad.
Si conectamos una carga al motor, tenemos una fuerza que se opone al
movimiento del eje, la intensidad aumenta (gráfica verde) al necesitar mayor par para vencer la carga y
la velocidad disminuye, ya que todo motor tiene una resistencia interna
cuya caída de tensión aumenta con la intensidad,
Velocidad = Kv( Ventrada - I*R) y el par generado en función
de la intensidad sería T=Kt( I - Ivacío ), por lo
que si metemos la segunda ecuación en la primera tenemos
Velocidad = Kv( Ventrada - R( Ivacío + (T/Kt)), que nos da
la velocidad de nuestro robot en función del par necesario,
voltaje para distintas condiciones.
La gráfica roja se corresponde con la potencia
mecánica de nuestro motor que es igual al par*velocidad (N*m
y rad/sec), a la hora de elegir un motor debemos especificar a que
velocidad mínima queremos que se mueva y que par
máximo debe de vencer, esto nos dará la potencia
requerida para mover nuestro robot y con la que elegiremos un motor
cuya potencia máxima sea superior a la anterior. Poniendo
una potencia mayor que la necesaria podremos trabajar más
cerca de la zona de máxima eficiencia. La potencia
máxima se encuentra siempre en el 50% del valor de la
velocidad sin carga y en el 50% del par máximo (cuando el
eje está bloqueado), Pmax=0.25*Vmax*Tmax. La diferencia
entre la potencia de entrada y la potencia de salida se convierte en
calor, y el calor en esto de los robots suele ser un problema en todos
los sentidos.
La gráfica gris es la eficiencia de nuestro motor, y nos
dice como el motor convierte la potencia de entrada en potencia
útil, eficiencia = Pentrada/Psalida, siendo Psalida=( Iin -
Ivacío)*(Vin - Iin*Rinterna) y Pentrada = Vin*Iin. La
diferencia entre estas potencias se convertía en calor,
cuanto más cerca trabajemos de la máxima
eficiencia menor será el calor generado y menos problemas
tendremos ya que una alta temperatura puede destruir el
motor fundiendo algunos de sus componentes o haciendo que los
imánes permanentes pierdan sus propiedades
magnéticas. Además cuanto mayor sea el
calor en nuestro robot, mayor sera la resistencia del cableado
disminuyendo la tensión entregada al motor.
Observando esto vemos que según aumenta el par va
disminuyendo la eficiencia del motor, aumentando la intensidad y el
calor generado, por esta razón siempre debemos evitar que
una rueda de un robot se quede bloqueada con el motor encendido. Cuando
esto pasa la corriente que atraviesa el motor es máxima y
que se acabe quemando algo suele ser cuestión de segundos.
Por eso nuestro sumo debería incluir unos encoders en alguna
rueda por si nuestros motores pueden llegar a bloquearse, para detectar
la situación y realizar alguna maniobra evasiva antes de
quemar algo. Hay motores que suelen tener un amperaje muy
alto, hay que tener en cuenta en la caída de
tensión que podemos tener en el cableado.
Una práctica común suele ser alimentar los
motores a tensiones mayores que las recomendadas, ésto se
puede hacer para ganar más velocidad, más par,
pero reducirá la vida de nuestro motor ya que al igual que
aumentamos la velocidad aumentamos mucho más el calor
generado, y por tanto las probabilidades de romper algo son mucho
mayores.
Con esto en mente yo estoy construyendo una base para mi sumo con 10
ruedas de 1.6 cm de radio propulsadas por 10 pequeños
motores de continua, sus características son las siguientes
para 6V:
Operating v :
4.5v - 8v
Nominal v :
6v
No Load RPM :
626
No Load A :
0.2A
Stall Current :
1.9A
Stall Torque :
22
oz-in 158 mN-m
Kt :
11.8
oz-in/A 83 mN-m/A
Kv :
104 rpm/v
Por lo que haciendo los cálculos, mi sumo va a pesar 3 Kg,
llevo 10 ruedas de goma de 2 cm de ancho, al ser un material
elástico y de alta adherencia le voy a poner un coeficiente
de rozamiento entre 1-1.5, por lo que mi fuerza de rozamiento
máxima que debería proporcionar el motor para el
mejor caso de 1.5 sería: Fr=1.5*3*10= 45 N, el par necesario
que deberían generar mis motores sería de
45N*1.6cm = 72 N*cm. Si consigo que el robot oponente acabe sobre mi
cuña tendría una fuerza mayor, pero no vamos a
ser tan optimistas...
Mirando el par de mi motor veo que es de 158 mN-m, es decir
15.8 N*cm, multiplicado por los 10 motores que llevo 158 Newtons*cm de
par máximo, lo que me situaría en la zona de Pmax
de la gráfica para cada motor aproximadamente. La velocidad
que tendría mi robot moviendose con este par
sería cercana a la de potencia máxima, es decir a
la mitad de la velocidad sin carga que sería de
aproximadamente 300 r.p.m, es decir 5 vueltas por segundo. La velocidad
del robot sería 2*pi*r*5 cm/s = 50 cm/s, teniendo la
opción de sobrealimentar si requiero más
velocidad con los riesgos que con lleva.
Bueno esto en la teoría, luego en la práctica a
saber que sale, a ver si se acaban mis problemas con el aluminio de 3mm
y tengo una primera versión lista pronto para empezar con la
parte de control que tiene lo suyo y de los sensores. Dejo esto
aquí como un primer resumen en el que debo de seguir
trabajando, ya que el tema es amplio...
Para cualquier comentario, duda, corrección más abajo. Gracias. Saludos.