Prototipos velocista de iniciación C.I.r.E. Recientemente hemos comenzado las reuniones semanales del C.I.r.E.
(Club de Informática, robótica y Electrónica), en
el que quedamos una tarde a la semana en las instalaciones de la
e.u.i.t.i. (U.P.M) para tratar temas de electrónica y
robótica. Comenzamos hace dos semanas y de momento estamos
asistiendo unas 9-12 personas, por lo que hemos empezado bastante bien.
El objetivo es difundir la robótica y electrónica, crear
grupos de trabajo en los que intercambiar ideas, aprender y avanzar con
proyectos de manera individual y colectiva. Para ello una de las
primeras actividades que se van a realizar es la creación de una
liga de velocistas, con una carrera mensual puntuable y talleres
semanales, en donde los interesados podrán construir un robot
velocista (el robot más sencillo de hacer para empezar en este
mundo) semana a semana y competir con el resto una vez al mes
sumando puntos a modo de liga, contamos con el apoyo de la U.P.M. por
lo que la idea del club puede llegar a buen puerto.
Tras un par de meses pensando en que puedo aportar de manera individual
al club.. he comenzando desarrollando dos proyectos en los ratos libres
para el C.I.r.E., de los que ya tengo los primeros prototipos e ideas y espero tener un prototipo final de ambos para principios de octubre:
Uno es la construcción de un robot velocista de bajo coste
(similar al Robot Zero) para todo aquel que quiera empezar pueda
montarse un primer velocista de manera sencilla y programarlo
(ver si le gusta la robótica de competición), sin
quedarse atascado en el desarrollo de la electrónica y
elección de componentes, que tanto cuesta a las personas que
empiezan por primera vez a construir sus primeros robots.
El segundo proyecto que pretendo realizar es un poco más
complejo, es la construcción de un mini robot cuadrúpedo
de bajo coste (ampliable sus características por
módulos), montado con 8 servomotores pequeños de las
tiendas chinas para las 4 patas y otro servomotor para la cabeza. Una
alternativa a la robótica de competición (representada
por el proyecto anterior) sería la de exibición
recogida en este proyecto.
La idea es documentar y proporcionar robots y electrónica
de distinto tipo al menor coste posible (se indicará donde
comprar las piezas y los pcbs made in China se darán a precio de
coste), para que todo aquel que quiera montarse su primer robot, o
comenzar con sus primeros circuitos lo tenga lo más fácil
posible.., además contando con la ayuda presencial del C.I.r.E.
Claro está que no va a salir un velocista para ganar el Cosmobot
(el concurso de velocistas más importante de España en
cuanto a premios),hay una limitación en componentes (la idea es
que cualquier robot no pase los 70-90 euros) pero se intentará
sacar algo decente de ese presupuesto.
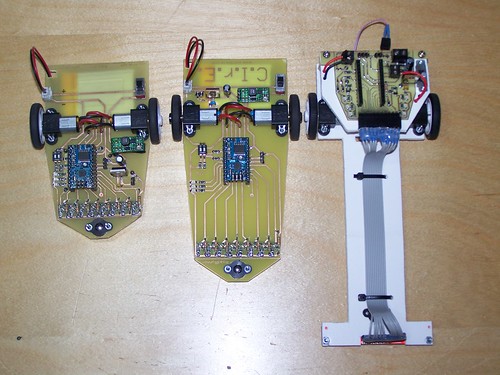
Después de todo el rollo anterior, los primeros prototipos del
robot velocista ya están montados, se basan en los motores y
ruedas de pololu.com y casi seguro que serán los seleccionados
para el robot final. Su consumo es muy bajo, permiten alcanzar
velocidades altas (más de lo que se puede controlar) y el precio
es bajo y el montaje de la rueda y soporte es muy simple, por lo que es
lo mejor que he visto. La única duda que tengo es que motor
elegir, el de 1.6 A en stall o el de 360 mA, tengo que medir la
autonomía del robot.
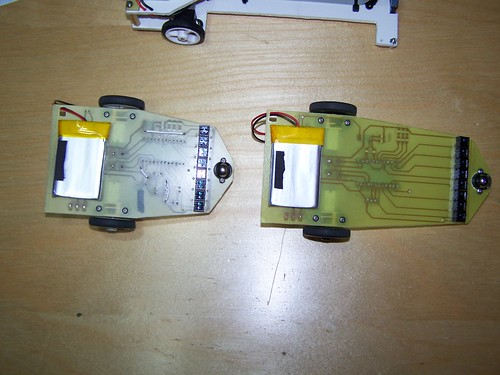
La
base del robot será la propia pcb sobre la que se va a soldar la
electrónica, en estos prototipos la electrónica que lleva
es la de pololu, pero por su alto coste se va a diseñar e
integrar en el propio pcb de la base, la Baby Orangutan está
sobre los 30 euros en España (demasiados euros para un micro y
un puente en h que comprarlos cuesta sobre los 4 euros).
La batería será una Lipo de 3.7 V que cuenta con un
circuito de protección, una vez que alcanza cierta
tensión la batería se desconecta parando el robot, lo que
evita posibles problemas debido a estas baterías. Los motores
necesitan unos 6 V para funcionar, por lo que se ha añadido un
conversor DC-DC regulable (que probablemente también se
implemente componente a componente) que sube la tensión de la
batería hasta 9 V para alimentar a los motores, y además
mantiene esta tensión de salida constante durante toda la
descarga de la batería, lo que se agradece a la hora de
programar y realizar los ajustes en el robot.
El sensor seleccionado para leer la línea es el CNY70, en estos
prototipos se leen en digital, ya que su objetivo es evaluar el
diseño de la base (longitud de ésta) en función
del motor seleccionado y fuerza capaz de transmitir a la pista, el
prototipo final tendrá la opción de leer los sensores en
digital y en analógico, a gusto de cada uno.
En cuanto al microcontrolador supongo que montaré las versiones
con PIC y AVR planteandome si merece la pena hacer compatible la
versión AVR con Arduino, que si se proporcionan las librerias
para el control del hardware del micro necesario para el robot pues
desde mi punto de vista no merece la pena, es mejor entrar directamente
con WinAVR + AVR Studio.
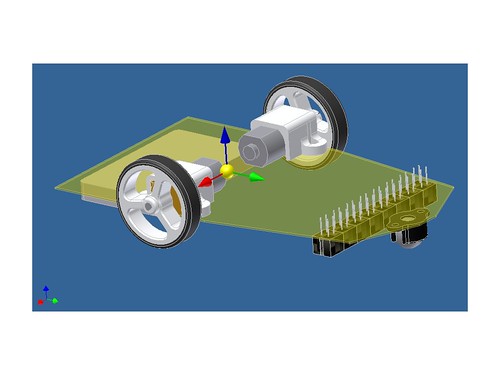
El
peso del robot pretende ser el mínimo para reducir las inercias,
las versiones del robot en pcb están sobre los 83-86 gr y
supongo que montaremos sus modelos en CAD, para ver los centros de masas
e inercias, como me estuvo enseñando Raúl el pasado
jueves con sus robots, aquí un ejemplo de los prototipos que está enviando al foro del C.I.r.E.
Prototipo C.I.r.E. Velocista corto de iniciación.
Los pcbs de los primeros prototipos para insolar (aún están bastante lejos del robot final): robot corto, robot largo.
Sólo se han montado y metido el programa del robot zero, por lo
que les quedan unas cuantas reuniones semanales para ver hasta que
velocidad se puede llegar con ellos, de momento se ha hecho
una prueba y el metro por segundo se pasa facilmente, por lo que
en principio estos motores son suficientes para el velocista de
iniciación del C.I.r.E.
Prueba de funcionamiento de los prototipos en la pista de velocistas del C.I.r.E.
Para cualquier idea, comentario, pregunta.... Foro.